A
dicembre 2010 è stato realizzato lo Stem a Sommariva Perno (CN), il
primo prototipo statico del kitegen. La potenza prevista per
quest'impianto è di 3Mw.
Per produrre energia lo Stem avrà un funzionamento elementare a yo-yo: le funi saranno srotolate con il kite in portanza e metteranno in funzione il generatore di elettricità. Raggiunta la distanza massima del kite dall'impianto, questo verrà messo in posizione di stallo e il kite verrà ritirato, quindi il ciclo si ripeterà.
Per produrre energia lo Stem avrà un funzionamento elementare a yo-yo: le funi saranno srotolate con il kite in portanza e metteranno in funzione il generatore di elettricità. Raggiunta la distanza massima del kite dall'impianto, questo verrà messo in posizione di stallo e il kite verrà ritirato, quindi il ciclo si ripeterà.
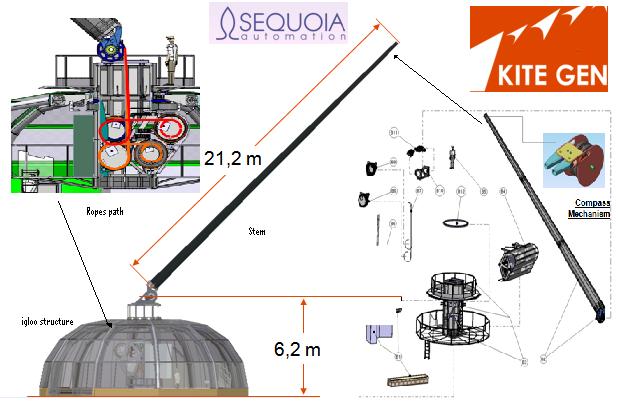
Lo
Stem, letteralmente “Stelo” è il componente più appariscente del
Kitegen in configurazione yo-yo, tanto che l’intera macchina
viene denominata Stem.
E’un
braccio robotico sensorizzato realizzato in materiali leggeri
(alluminio o fibra di carbonio) montato su una torretta rotante
vincolata alla struttura portante (igloo o cupola) mediante una ralla.
Sebbene molte soluzioni adottate nei vari progetti di eolico d'alta quota (compreso il prototipo MobiliGen)
non prevedevano un braccio robotico di tali dimensioni (circa 20 m). Lo
stem non è certamente un elemento decorativo ma implementa ben 7
funzionalità della macchina:
Il cervello del progetto è infatti il software che, elaborando i dati raccolti dai sensori avionici montati a bordo delle ali, ottimizza in tempo reale le traiettorie di volo delle stesse al fine di massimizzare la produzione di energia.
Nel 2006 è stato costruito un primo prototipo nome in codice KSU1, della potenza nominale di 40 kW, che è stato testato fino a un altezza di 800 m.
Oltre a confermare i dati teorici, il prototipo ha già prodotto energia grazie a un ciclo intermittente di trazione e recupero: 5 kW di media e 30 kW di picco con un vento a terra di 4,5 m/s.
Il generatore KiteGen® Stem costituisce il modulo base di soluzioni in grado di assicurare una elevata scalabilità dell’impianto. La configurazione “Wind Farm” consiste di una serie di generatori raggruppati in uno spazio delimitato, in modo da moltiplicare la produzione di energia per singolo luogo di produzione.
La configurazione Stem è in corso di realizzazione ed i primi due impianti sono attualmente in costruzione in Provincia di Asti (Comune di Berzano di S. Pietro) ed in provincia di Cuneo (Comune di Sommariva Perno), siti caratterizzati da bassa ventosità e del tutto inadeguati alla realizzazione di impianti eolici tradizionali. La messa in funzione, inizialmente prevista per la fine del 2009, è stata posticipata, principalmente a causa di problemi di ordine burocratico.
- La grande maggioranza dei fallimenti nei decolii (kite-crash) o nelle manovrare di volo avviene a bassa quota. Lo stem consente di operare sempre con la vela posta ad una quota opportunamente lontana dal suolo; inoltre il vento presente a 15-20 m di altezza sul terreno è sempre più inteso che al suolo, quindi la vela a quell'altezza ha maggiore probabilità di trovare il vento con la difficoltà sufficiente per il decollo.
- Il movimento ed i gradi di libertà del braccio robotico stem consentono di effettusre delle rapide manovre che generano un vento apparente sufficiente per far alzare la vela in volo anche in caso di venti molto deboli.
- Lo stem consente ai cavi in uscita dagli alternomotori e dagli argani di rimanere allineati per molti metri riducendo la fatica e le vibrazioni su questi componenti.
- Lungo lo stelo sono posti i sensori capaci di inviare alla centrale di controllo le informazioni sulle deformazioni meccaniche in atto e la posizione del braccio. In particolare sono presenti 9 nanogauge (sensori di deformazione) e gli encoder che misurano gli angoli di rotazione del braccio rispetto al piano orizzontale e verticale.
- Quando la vela è investita da raffiche lo stem è il primo componente cui viene trasmessa la forza impressa dalla raffica mediante i cavi. I sensori di deformazione inviano le informazioni alla centrale di controllo che, qualora si rilevano raffiche troppo intense, è in grado di rispondere adeguatamente con manovre atte ad allontanare la vela dalla finestra di potenza riducendo la sollecitazione meccanica. Durante il tempo di elaborazione e reazione della centrale di controllo, che per quanto breve è non nullo, lo stem consente di assorbire la sollecitazione meccanica mediante una opportuna deformazione elastica, salvaguardando i componenti meccanici più delicati.
- Lo stelo consente di supportare il compasso, che è una mano robotica montata sulla sommità, che aggiunge gradi di libertà alle manovre sui cavi e la vela. In particolare le due "dita" (o baffi) del compasso divaricandosi mantengono separati i cavi durante le manovre e ne evitano gli intrecci (twisting)
- Secondo l'orografia dei siti i venti possono variare la direzione prevalente più o meno rapidamente nel corso delle stagioni, o anche nel corso di una stessa giornata. Lo stelo, ruotando in accordo con le direzioni dei venti, consente sempre di posizionare la vela secondo la finestra di massima potenza.
Il cervello del progetto è infatti il software che, elaborando i dati raccolti dai sensori avionici montati a bordo delle ali, ottimizza in tempo reale le traiettorie di volo delle stesse al fine di massimizzare la produzione di energia.
Nel 2006 è stato costruito un primo prototipo nome in codice KSU1, della potenza nominale di 40 kW, che è stato testato fino a un altezza di 800 m.
Oltre a confermare i dati teorici, il prototipo ha già prodotto energia grazie a un ciclo intermittente di trazione e recupero: 5 kW di media e 30 kW di picco con un vento a terra di 4,5 m/s.
Il generatore KiteGen® Stem costituisce il modulo base di soluzioni in grado di assicurare una elevata scalabilità dell’impianto. La configurazione “Wind Farm” consiste di una serie di generatori raggruppati in uno spazio delimitato, in modo da moltiplicare la produzione di energia per singolo luogo di produzione.
La configurazione Stem è in corso di realizzazione ed i primi due impianti sono attualmente in costruzione in Provincia di Asti (Comune di Berzano di S. Pietro) ed in provincia di Cuneo (Comune di Sommariva Perno), siti caratterizzati da bassa ventosità e del tutto inadeguati alla realizzazione di impianti eolici tradizionali. La messa in funzione, inizialmente prevista per la fine del 2009, è stata posticipata, principalmente a causa di problemi di ordine burocratico.